Este robô poderia saltar mais alto que a Estátua da Liberdade – se algum dia o construíssemos corretamente
Os cientistas projetaram um robô que, segundo eles, poderia um dia saltar 120 metros – altura suficiente para passar pela Estátua da Liberdade com um único salto. Ele poderia até saltar até 200 m de altura na lua.
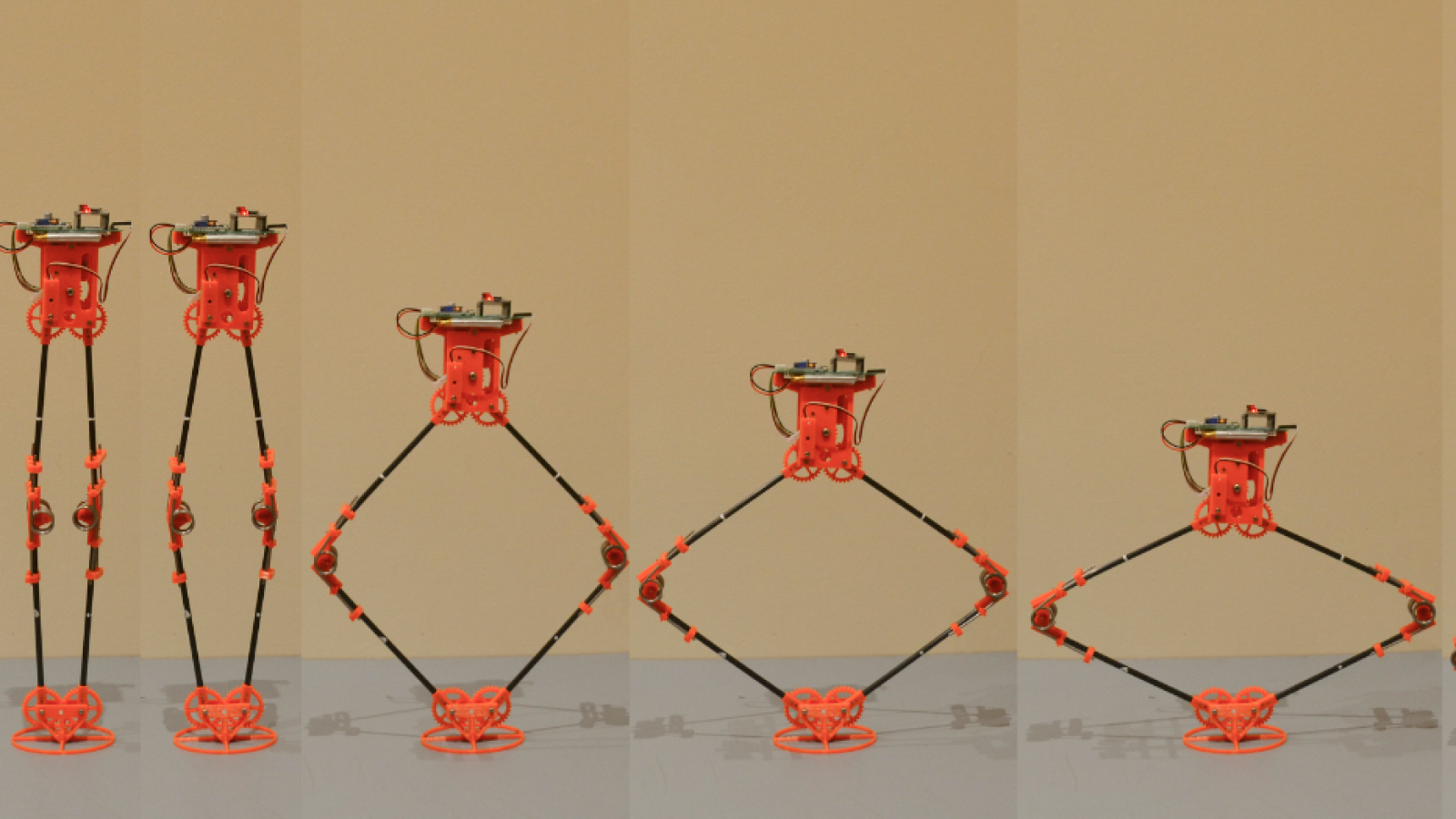
O robô de salto em altura foi projetado para explorar terrenos difíceis que os robôs convencionais teriam dificuldade em atravessar, como sistemas de cavernas, florestas e potencialmente outros planetas. Possui pernas exclusivas em formato de prisma com molas extensíveis projetadas para maximizar a transferência de energia elástica em energia cinética durante um salto.
Os pesquisadores disseram que seu projeto poderia permitir que os robôs saltassem a alturas muitas vezes maiores que seu próprio tamanho e mais de seis vezes maiores do que o recorde atual. Eles publicaram suas descobertas em 24 de maio no periódico Mecanismo e Teoria da Máquina.
Para demonstrar sua teoria de design, os cientistas construíram um robô de 40 cm de altura que podia saltar mais de 1,6 m no ar.
“Embora robôs saltadores já existam, há vários grandes desafios no design dessas máquinas saltadoras, sendo o principal deles saltar alto o suficiente para superar obstáculos grandes e complicados”, disse o coautor do estudo. João Loum pesquisador associado em robótica espacial na Universidade de Manchester, disse em uma afirmação. Nosso projeto melhoraria drasticamente a eficiência energética e o desempenho de robôs saltadores movidos a mola.”
Relacionado: Assista a um 'cão robô' percorrendo um percurso básico de parkour com a ajuda de IA
Os robôs convencionais são normalmente equipados com rodas ou, no caso de máquinas como Atlas da Boston Dynamics e Ver, duas ou quatro pernas. Embora esses designs funcionem bem em terrenos simples, eles não são adequados para enfrentar obstáculos como penhascos ou superfícies íngremes e irregulares. É aqui que um design de salto se torna útil.
Um salto gigante para a espécie robótica
Robôs saltadores normalmente usam motores para armazenar energia em uma mola e, então, liberam essa energia para impulsionar o robô para cima. A amplificação de potência — um mecanismo visto em animais como pulgas e gafanhotos, por meio do qual a energia elástica armazenada é convertida em energia cinética — permite que as molas gerem maior potência de saída do que motores autônomos, resultando em saltos mais altos.
Anterior projetos de robôs saltadores incorporaram amplificação de potência, mas são propensos a decolar antes que a energia da mola seja totalmente liberada, disseram os cientistas, o que significa que a energia elástica armazenada não é totalmente convertida em energia cinética. Esses robôs também tendem a desperdiçar energia movendo-se de um lado para o outro ou girando, em vez de pular direto para cima.
“Havia muitas perguntas a serem respondidas e decisões a serem tomadas sobre o formato do robô, como, por exemplo, se ele deveria ter pernas para se impulsionar do chão como um canguru ou se deveria ser mais como um pistão projetado com uma mola gigante?” coautor Ben Parslewprofessor sênior de engenharia aeroespacial na Universidade de Manchester, disse no comunicado.
Para descobrir qual tipo de projeto seria melhor, os cientistas examinaram dois modelos de robôs: um com sistema “prismático” em linha reta e outro com sistema rotacional.
No modelo prismático, as pernas do robô se moviam em um movimento de pistão, similar a um pula-pula. No entanto, o peso extra na parte inferior do robô criava um efeito inercial, o que significa que a mola não conseguia se estender completamente antes que o robô deixasse o chão.
O modelo rotacional, por sua vez, apresentava pernas que se moviam em um movimento circular, semelhante ao de um canguru. Neste modelo, o movimento giratório das pernas fazia com que o robô deixasse o chão antes que as molas liberassem completamente sua energia armazenada — novamente, reduzindo a altura e a eficácia do salto.
Para resolver esses problemas, a equipe combinou o melhor dos dois designs. Ao deslocar a maior parte do peso do robô para o topo e tornar a parte inferior mais leve e aerodinâmica, eles conseguiram melhorar sua estabilidade e eficiência energética. Da mesma forma, ao usar pernas prismáticas de movimento reto com molas que se estendiam linearmente, os cientistas conseguiram mitigar o problema de decolagens atrasadas ou prematuras.
Estão em andamento trabalhos para controlar a direção dos saltos e aproveitar a energia cinética gerada quando o robô pousa, o que poderia ser usado para aumentar o número de saltos que ele pode realizar com uma única carga, disseram os cientistas. A equipe também explorará designs mais compactos, adequados para missões espaciais.